Electrical
Version 1
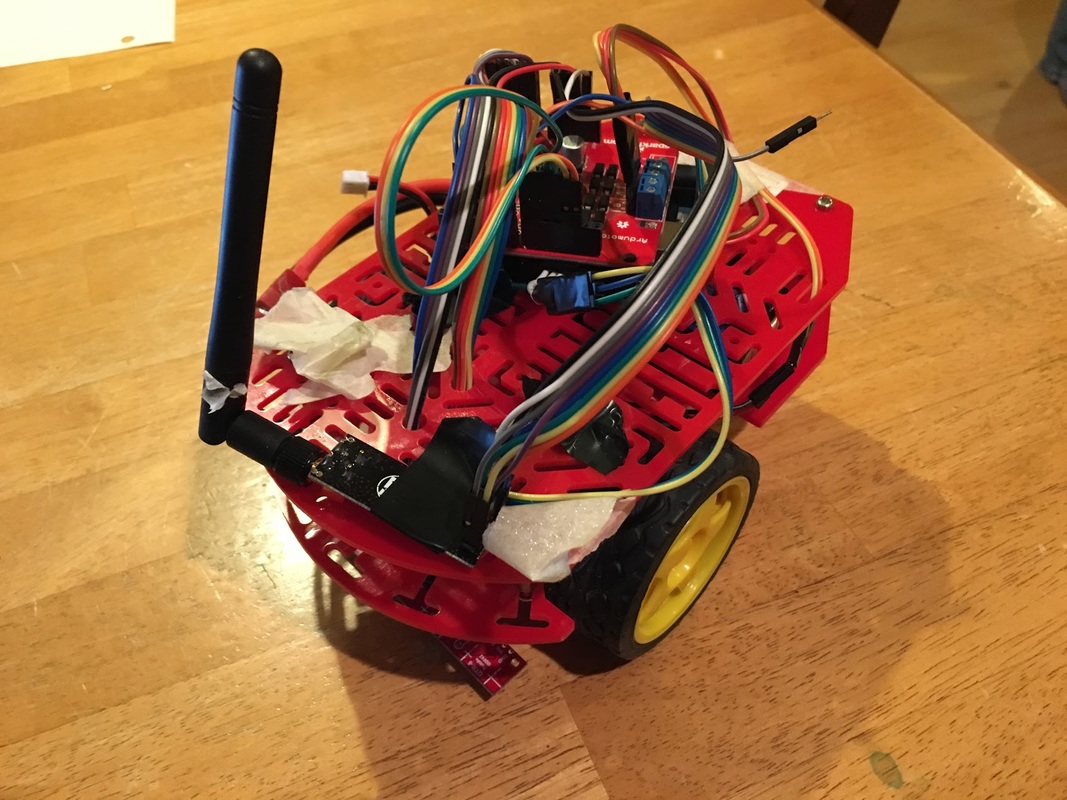
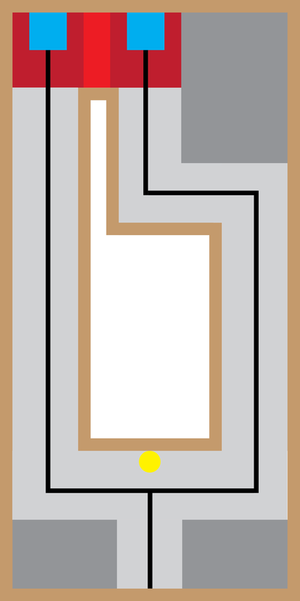
Version 1 of the electrical wiring was used for the run off competition December 4th, 2015. This version utilized an Arduino Uno, and Ardumoto Shield, an NRF24L01 wireless transceiver, and a Polulu QTR-RC8 line following sensor.
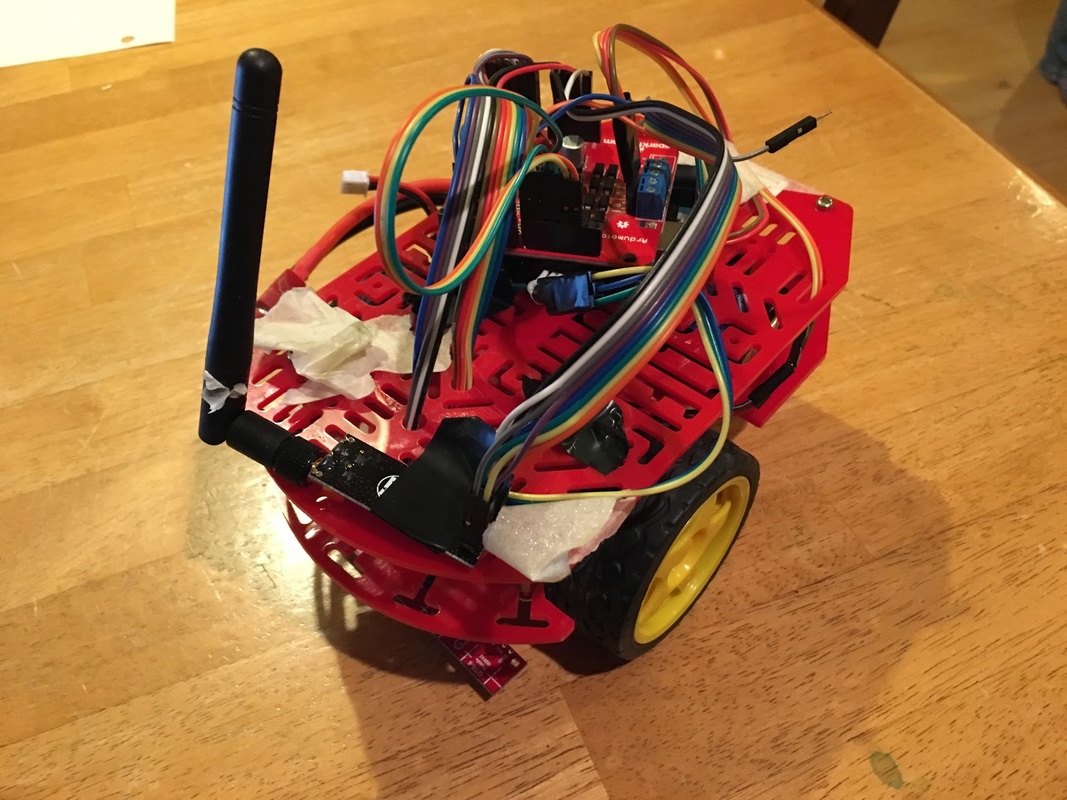
Version 1 vehicle prototype from pictured December 3rd just before run-offs.
Mechanical
Payload Retrieval Subassembly (unused)
Main Chassis (Unused)
Practice CourseS
Line FOllowing Practice Course
|
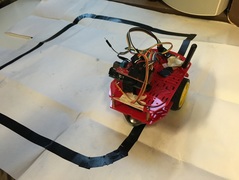
Early iterations of the IAV were tested on a track built exclusively to test line following. The course was far more portable and far smaller the the actual practice course. This course was primarily used to test early prototypes of a line following vehicle leading up to the December 4th, 2015 run offs.
|
|
Portable Practice Course
|
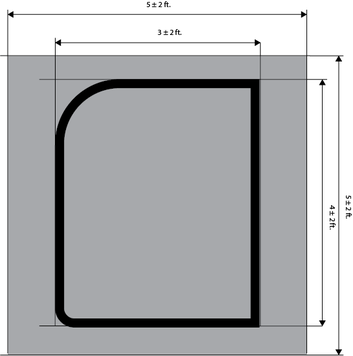
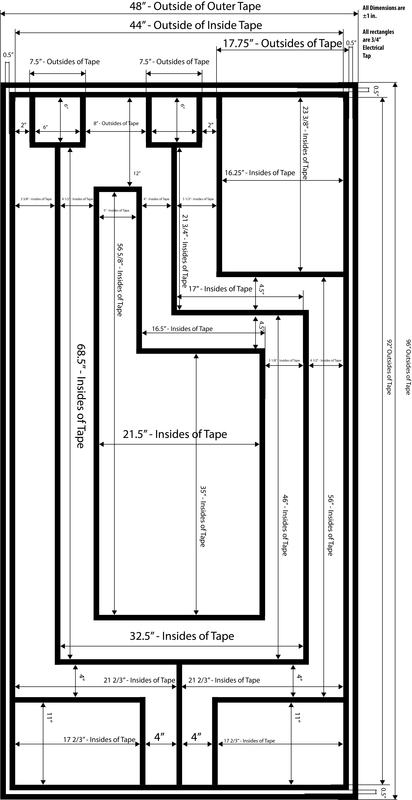
A detailed replica of the the final course as detailed in the COTSA Call to Conference 2016 was created in order to test the vehicle. A replica was designed to use entirely 3/4" electrical tape on a large sheet of paper in order to provide accurate dimensions for line following as well as portability. The course can be rolled up in order to allow for easy transportation.
|
