Early Prototype (Version 1)
|
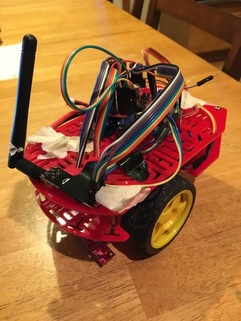
Early prototypes that tested line following and remote control functionality utilized the SparkFun RedBot chassis. This allowed electronics to be easily attached to the chassis and for new concepts to be tested before designing and building a final chassis. The SparkFun RedBot was used in Version 1 of the robot with Version 1 of the Source Code in the run-off competition December 4th, 2015. A school chassis was used; however it carried some major issues.
|
|
Version 2
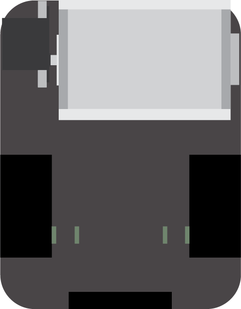
A top-down view of an early CAD drawing of the second generation chassis with the payload retrieval subassembly on the front.
|
The second version of the IAV chassis solves all of the above problems with the first generation chassis. The design can be manufactured utilizing a laser engraver and any material strong enough to support the weight of the vehicle. It could in theory be manufactured using acrylic plastic, aluminum, or cardboard. This gives flexibility to fix the cost issue. The second generation chassis will ride fairly close to the ground. It is low enough to allow for the payload retrieval subassembly to capture a tennis ball from the pedestal while sitting on top. It does this by mounting wheels above the main chassis itself and effectively hanging from the center of the wheels.
|
|
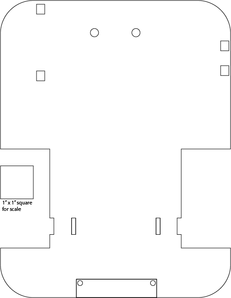
The right pictures a laser cut plan for the second generation chassis. Wheel bays are cut from the left and right of the vehicle. A front section is cut to allow for the line following sensor to be installed. Mounts for the motors and wheels are cut as small rectangles near the wheel bays. The top contains circular screw holes for a ball bearing to serve as a rear wheel, and rectangles are cut to mount the payload retrieval subassembly. This early revision contains an error in the sensor mount that cuts the screw holes for the sensor mount out of the chassis.
|
|
